



Turvallisuusskenaarioissa valvontalaitteet altistetaan usein tuulen - indusoiduille värähtelyille pitkän - etäisyyden asennuksen vuoksi. Kun kamera leveä - kulmatila osoittaa minimaalisen herkkyyden ulkoisille häiriöille, teleotila Optisesti vahvistaa mekaanisia värähtelyjä, mikä johtaa merkittävän kuvan hämärtymiseen tai jopa tavoitekeskuksen menetykseen. Näin ollen, aktiiviset stabilointimekanismit ovat nousseet kriittiseksi tekniseksi vaatimukseksi pitkille - valvontajärjestelmille. Nykyiset stabilointiotekniikat jakautuvat ensisijaisesti kahteen luokkaan: Optinen kuvanvakaus (OIS) ja Elektroninen kuvanvakaus (EIS).
EIS käyttää kuvaviestin - Käsittelyalgoritmia kuvanvakauden saavuttamiseksi. Se edellyttää, että nykyinen laukaus on laajentunut, mikä johtaa 10%: n - 20%: n tappioon. EIS -tekniikassa linssi vastaa vain kuvan hankkimisesta. Sen jälkeen kun anturi muodostaa kuvan, se on ensin stabiloitava kuvan stabiloitava rakennetulla - kuvaprosessorin ydinalgoritmissa, ja sitten video pakataan ja lähetetään. Tämäntyyppinen kuvanvakaus saavutetaan kokonaan digitaalisen prosessointitekniikan avulla, mikä vähentää videon laatua ja jolla on yleinen vakautusvaikutus. Sitä käytetään yleensä alhaisissa - lopputuotteissa kustannusetujen vuoksi.
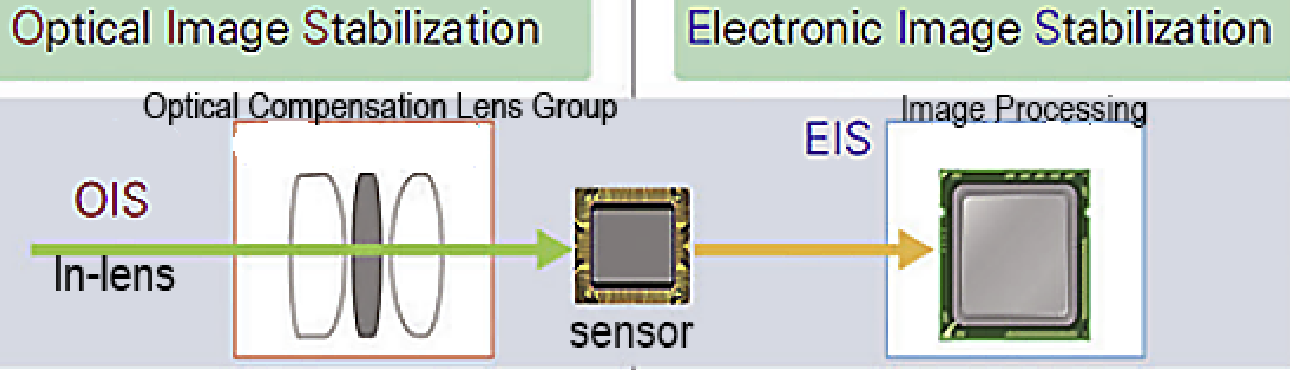
OIS käyttää rakennetun - linssikokoonpanon gyroskoopissa kameran värähtelyjen havaitsemiseksi. Gyroskooppi muuntaa mekaaniset liiketiedot OIS -ohjaimelle siirretyiksi sähköisignaaleiksi. Ohjaimen keskuskäsittelyyksikkö analysoi välittömästi ja laskee siirtymän tai kulman, joka linssin on kompensoitava ja käyttää kolmen kelajoukon ja magneetin tuottamaa sähkömagneettista voimaa käyttömoottorin läpi linssin tarkasti, korjata optinen polku ja välttää ravistelun aiheuttaman kuvan hämärtyminen. Optisessa suunnittelussa lisäämällä siirrettävä linssi, linssinsiirtoa säädetään ravistuksen määrän perusteella, kompensoi optisen polun takaisin vakaan tilaan.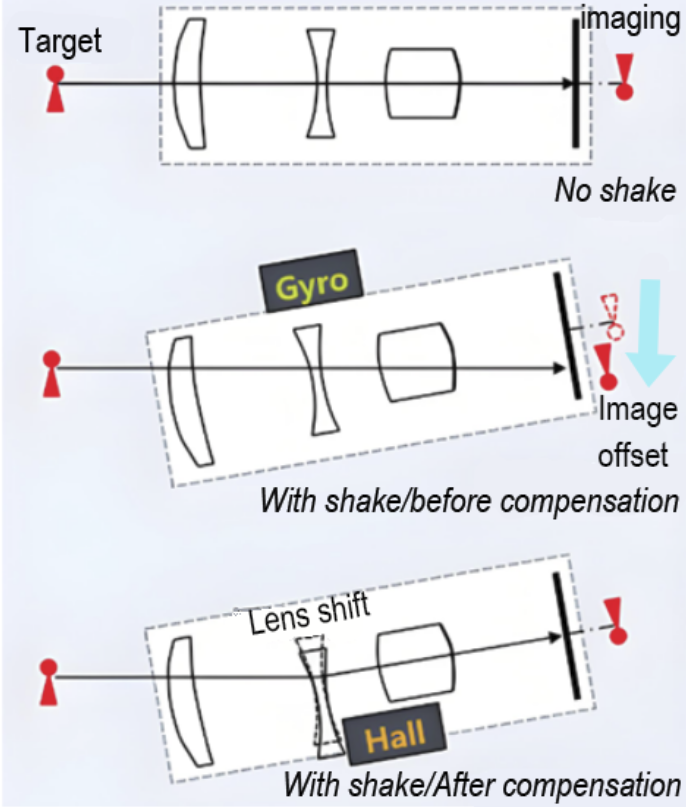
Jokaisessa valotussyklissä OIS: n on suoritettava peräkkäin: värähtelyn havaitseminen, signaalinkäsittely ja kompensoiva linssin käyttö. Koko prosessi on servoliike, jolla on myös lyhyen havaitsemisajan ominaisuudet, nopean signaalinkäsittelynopeus, pienin linssin kompensointimuunta